
Cambridge ARM MBed Enabled Robotic Gripper
This provides the detail for the development and control of a MBed compatible robot pincer gripper. The code provided allows control of the motor via serial communication to the MBed. The below video demonstrates the capabilities of the gripper. The gripper uses no sensors, but uses current feedback from the motor to provide feedback. A motor controller is also required to interface between the MBed and the gripper. This setup has been tested with the LPC1768, however, will work on all MBed platforms which provide pwm outputs.
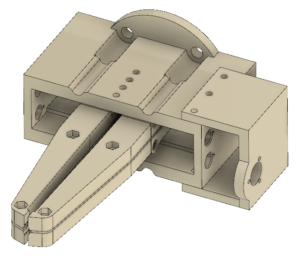
CAD & Design
To replicate this design, download and 3D print the CAD parts necessary to assemble the gripper. Only 3 parts are required. In addition to M6 threaded rods, two gears and one motor (suggested type maxon) are required. The CAD files can be found here.
Hello world Example
Example code here allows control of the gripper by serial communication to the MBed. This can be imported into the online MBed IDE. This assumes the motor controller ports are connected to pins p21 and p22, with the current input pin connected to p19, via a shunt resistor.